4.2. eCos
4.2.1. Setting up and running EcMasterDemo
- Build the eCos kernel with the parameters associated to the application
As a starting point there is a eCos configuration file (.ecc) file located at
SDK/LIB/eCos/x86/.eCos is unable to get command line parameters for main(). The parameters for the application are build in the kernel via the configuration tool ( Arguments to main ).
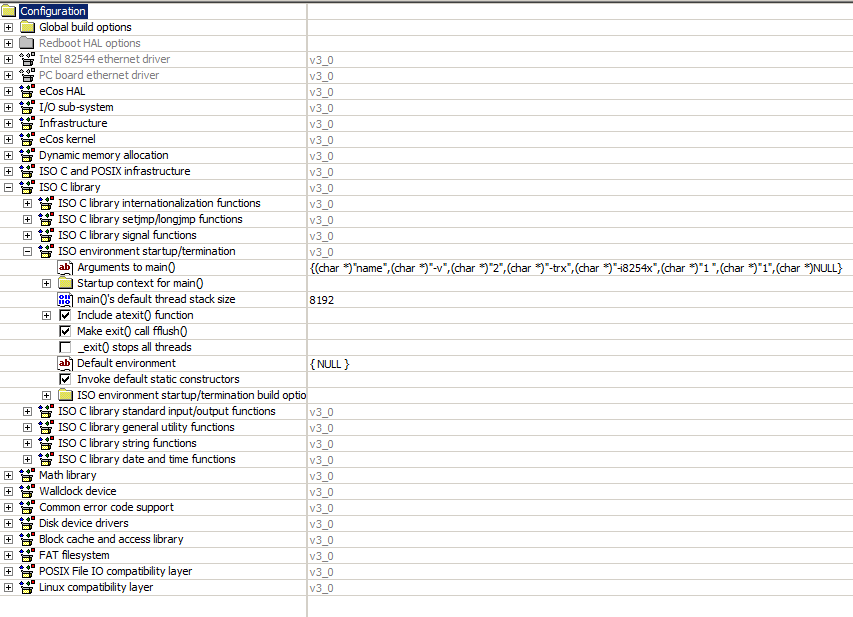
To use an other example with different parameters, the kernel has to be rebuild.
For the EcMasterDemo example following line has to be passed to the application via the configuration tool:
{ (char *)"name",(char *)"-f",(char *)"perf.xml", (char *)" -i8254x",(char *)"1",(char *)"1",(char *)"-v", (char *)"3",(char *)"-t",(char *)"60000",(char *)"-perf",(char *)NULL }
- Compile EcMasterDemo
As a starting point there is the Eclipse project for EcMasterDemo for eCos located at
Workspace/eCos/EcMasterDemo. The following macro inSources/OsLayer/eCos/EcOs.cpploads the ENI file from disk:"MTAB_ENTRY(fat, "/", "fatfs", "/dev/idedisk1/1", 0)"
- Copy the ENI file to target
eCos supports only the 8.3 file format. Adjust the ENI file name and the command line in the configuration tool accordingly.
- Configure Grub to load the application
Adjust the Grub menu file:
title eCos EcMasterDemo kernel (hd0,0)/EcMasterDemo boot
Load and start the EcMasterDemo with Grub
- Verify that the EcMasterDemo is running successfully
The EcMasterDemo takes some seconds to start. The following message is sent to the serial port on startup finished:
[ 3593.654951] Master state changed from <SAFEOP> to <OP>
See also
4.2.2. OS Compiler settings
Besides the general settings from Compiling the EcMasterDemo the following settings are necessary to build the example application for eCos.
- Extra include paths
<InstallPath>/SDK/INC/eCos <InstallPath>/Examples/Common/eCos
- Extra source paths
<InstallPath>/Examples/Common/eCos <InstallPath>/Sources/OsLayer/eCos/EcOs.cpp
- Extra library paths to the main EtherCAT components
<InstallPath>/SDK/LIB/eCos
- Extra libraries
libEcMaster.a libemllI8254x.a libtarget.a