4.4. Linux
4.4.1. OS optimizations
Linux itself is not real-time capable, so it is recommended to use it with the additional PREEMPT_RT patch.
The power management can disrupt cyclical processing, it is advisable to disable the CPUIDLE sub-system and CPUFREQ sub-system. The sub-systems can be disabled by changing the kernel command line parameters in the boot loader. On x86, x86_64 systems this is usually grub, on embedded devices with ARM, ARM64 is usually u-boot. It is also possible to build a custom kernel without these sub-systems.
Running a EC-Master application on a dedicated CPU core that is isolated from the Linux scheduler (ISOLCPUS) can provide additional stability.
4.4.1.1. CPUIDLE sub-system
- Check if CPUFREQ sub-system is enabled:
ls /sys/devices/system/cpu/
If cpuidle appears in the list, it is enabled.
- Disable CPUIDLE via the kernel command-line in grub:
linux /boot/vmlinuz-4.19.0-16-rt-amd64 cpuidle.off=1
4.4.1.2. CPUFREQ sub-system
- Check if CPUFREQ sub-system is enabled:
ls /sys/devices/system/cpu/
If cpufreq appears in the list, it is enabled.
- Disable CPUFREQ sub-system via the kernel command-line grub:
linux /boot/vmlinuz-4.19.0-16-rt-amd64 cpufreq.off=1
If CPUFREQ is not to be deactivated, the governor should be set to performance.
- The currently active governor can be determined as follows:
cat /sys/devices/system/cpu/cpu*/cpufreq/scaling_governor- The available governors with:
cat /sys/devices/system/cpu/cpu*/cpufreq/scaling_available_governors- To change governor use:
echo performance > /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor
4.4.1.3. ISOLCPUS
- Isolate CPU core number 4 of a quad-core processor via the kernel command-line grub:
linux /boot/vmlinuz-4.19.0-16-rt-amd64 isolcpus=3
- Running EcMasterDemo on the isolated CPU core by setting the CPU affinity
-a: ./EcMasterDemo -a 3
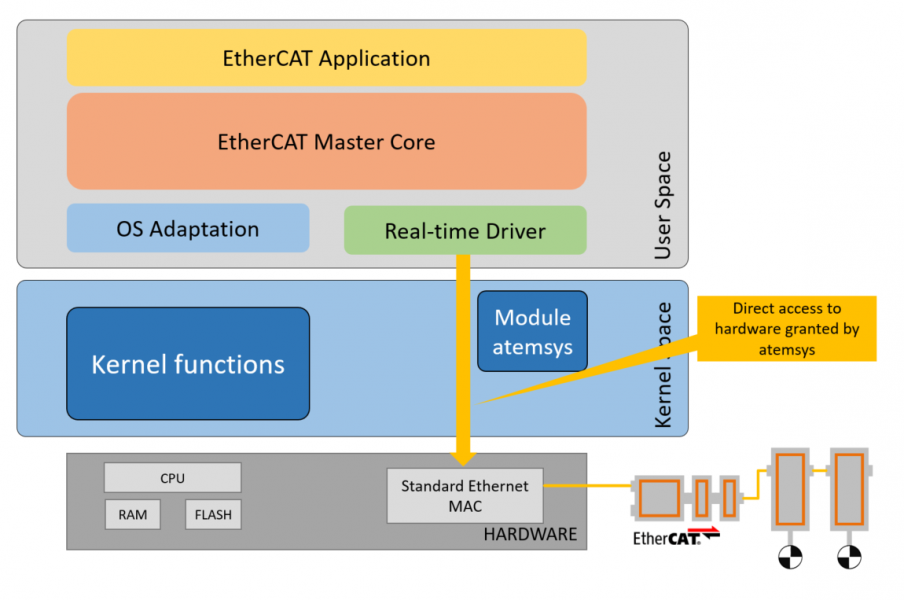
4.4.2. atemsys kernel module
To use Optimized Link Layers under Linux, the atemsys kernel module must be compiled and loaded. atemsys grants direct access to hardware to improve the performance.
All necessary scripts, source code and a detailed description of the installation can be found on https://github.com/acontis/atemsys. A ready-to-use Yocto recipe is also available on https://github.com/acontis/meta-acontis
4.4.2.1. atemsys as Device Tree Ethernet Driver
atemsys can also be used as a device tree driver to avoid certain conflicts between the link layer and the Linux kernel, e.g. power management, shared MDIO bus, etc..
A detailed guide on how to customize the device tree accordingly can also be found on https://github.com/acontis/atemsys. Example device tree modifications for different link layers/SoC can be found in https://github.com/acontis/atemsys/wiki.
Note
This is the preferred solution on all embedded devices with device tree support.
4.4.2.2. atemsys and PHY OS Driver
To use the PHY OS Driver, the acontis kernel module atemsys has to be included in the kernel device tree as an official driver for the Ethernet controller and doesn’t required any additional configuration at the application level. As a result atemsys can interact with Linux drivers.
4.4.3. Unbind Link Layer instance
Link Layer instances used by optimized Link Layers may not be bound by kernel drivers modules! Unbind can be done by unloading the kernel driver module, via the unbind interface of the driver or by modifying the device tree.
4.4.3.1. Unbind from kernel driver
The following command unbinds an instance without unloading the kernel driver module:
PCI
echo "<Instance-ID>" > /sys/bus/pci/drivers/<driver-name>/unbind
Example:
echo "0000:00:19.0" > /sys/bus/pci/drivers/e1000e/unbind
This call requires the PCI bus, device, function codes (in the above example it is 0000:00:19.0). The codes can be found using Linux commands like, for example:
ls /sys/bus/pci/drivers/e1000e
SoC
echo "<Instance-ID>" > /sys/bus/platform/drivers/<driver-name>/unbind
Example:
echo "2188000.ethernet" > /sys/bus/platform/drivers/fec/unbind
4.4.3.2. Unload kernel driver
Not all drivers allow unbinding of network adapters. If unbinding is not supported the corresponding Linux kernel driver must not be loaded.
The following command lists the loaded kernel modules that may conflict with optimized Link Layers:
lsmod | egrep "<module-name>"
Example:
lsmod | egrep "e1000|e1000e|igb"
PCI/PCIe: The command lspci -v shows which driver is assigned to which network card, e.g.:
lspci -v
...
11:0a.0 Ethernet controller: Intel Corporation 82541PI Gigabit Ethernet Controller (rev 05)
...
Kernel driver in use: e1000e
Modules can be prevented from loading with the following commands:
echo blacklist <module-name> | sudo tee -a /etc/modprobe.d/blacklist.conf
update-initramfs -k all -u
sudo reboot
The following table shows the kernel modules related to the Optimized Link Layers:
Chip |
Link Layer Name |
Kernel driver(s) |
Remarks |
|---|---|---|---|
Broadcom Genet |
emllBcmGenet |
genet |
Unbind not supported |
Beckhoff CCAT |
emllCCAT |
ec_bhf |
|
CPSW |
emllCPSW |
ti_cpsw |
|
DesignWare 3504 |
emllDW3504 |
stmmac |
|
emllEG20T |
|||
Freescale TSEC/eTSEC v1/2 |
emllETSEC |
gianfar_driver |
|
Freescale FEC and ENET controller |
emllFslFec |
fec, fec_ptp |
|
Xilinx Zynq-7000/Ultrascale |
emllGEM |
||
Intel Pro/1000 |
emllI8254x |
igb, e1000, e1000e |
|
Intel Pro/100 |
emllI8255x |
e100 |
|
ICSS |
emllICSS |
prueth,pruss |
Unbind not supported |
RDC R6040 |
emllR6040 |
||
Realtek RTL8139 |
emllRTL8139 |
8139too, 8139cp |
|
Realtek RTL8169 / RTL8111 / RTL8168 |
emllRTL8169 |
r8169 |
Unbind not supported |
SuperH |
emllSHEth |
sh_eth |
Unbind not supported |
Generic |
emllSockRaw |
4.4.4. Docker
It is possible to operate EC-Master within a Docker container with realtime priority. The atemsys kernel module should be installed on the host in order to operate the container with the lowest possible capabilities and privileges.
The following additional settings, permissions for docker run are required:
- Add atemsys device to container
--device=/dev/atemsys:/dev/atemsys
- Allow max realtime priority
--ulimit rtprio=99
- Add capability to set priority an lock memory
--cap-add=sys_nice --cap-add=ipc_lock
- Publish RAS server port 6000
-p 6000:6000
4.4.5. Setting up and running EcMasterDemo
Unbind Link Layer instance, e.g.
echo 0000:00:19.0 > /sys/bus/pci/drivers/e1000e/unbindLoad atemsys kernel module
insmod atemsys.koCopy files from EC-Master package
/binand aeni.xmlto directory e.g./tmp.Adjust LD_LIBRARY_PATH search locations for Optimized Link Layers if necessary, e.g.
export LD_LIBRARY_PATH=/tmp:$LD_LIBRARY_PATHRun EcMasterDemo
cd /tmp ./EcMasterDemo -f eni.xml -i8254x 1 1 -perf
See also
4.4.5.1. Run in Docker container
Unbind Link Layer instance and load atemsys on the host.
Create a directory on the host (e.g.
~/docker) and copy files from EC-Master package/binandeni.xmlinto this directory.- Start bash console in container
sudo docker run -it \ --name atem_container \ --device=/dev/atemsys:/dev/atemsys \ --ulimit rtprio=99 \ --cap-add=sys_nice --cap-add=ipc_lock \ -v ~/docker:/home/docker \ -p 6000:6000 \ ubuntu bashCommand line arguments:
-itAllocate a pseudo-TTY and run container--name atem_containerContainer name--device=/dev/atemsys:/dev/atemsysAdd atemsys device to container--ulimit rtprio=99Allow max realtime priority--cap-add=sys_niceAdd Linux capability to set priority--cap-add=ipc_lockAdd Linux capability to lock memory-v ~/docker:/home/dockerMount previously create directory to container-p 6000:6000Publish RAS server port 6000ubuntu bashUse Docker image ubuntu and start bash
Run EcMasterDemo in container
cd /home/docker export LD_LIBRARY_PATH=. ./EcMasterDemo -f eni.xml -i8254x 2 1 -perf
4.4.6. OS Compiler settings
Besides the general settings from Compiling the EcMasterDemo the following settings are necessary to build the example application for Linux
- Possible ARCHs (see ATECAT_ARCHSTR in
SDK/INC/Linux/EcOsPlatform.h): armv4t-eabi
armv6-vfp-eabihf
aarch64
x64 (aka amd64)
x86 (aka i686)
PPC
- armv4t-eabi and armv6-vfp-eabihf are incompatible with each other. A potentially armv6-vfp-eabihf compatible system returns success on
readelf -A /proc/self/exe | grep Tag_ABI_VFP_args
- Extra include paths
<InstallPath>/SDK/INC/Linux <InstallPath>/Examples/Common/Linux
- Extra source paths
<InstallPath>/Examples/Common/Linux <InstallPath>/Sources/OsLayer/Linux
- Extra library paths to the main EtherCAT components
<InstallPath>/SDK/LIB/Linux/<Arch>
- Extra libraries (in this order)
AtemRasSrv EcMaster pthread dl rt